Da la impresión que el coche inteligente es un juego al cual solamente pueden jugar grandes fabricantes como Tesla y los grupos automotrices tradicionales, y en dónde el código abierto no tiene posibilidades. El proyecto ASLAN Autonomy desmiente este último punto, aunque por el momento con limitaciones.
Y la limitación es la velocidad, ya que es un sistema que, al menos por el momento, está preparado para operativa única y exclusivamente en entornos de baja velocidad.
Como proyecto, está abierto a la participación de empresas de diversa índole que puedan estar relacionadas con los vehículos autoconducidos, disponiendo ya de dos universidades (la de Monash en Australia, y la Han de Ciencias Aplicadas holandesa), una empresa de seguridad (la británica Enkrypta), otra propiamente de vehículos autoconducidos (la también británica Streetdrone), y una última de tecnologías de geolocalización (la británica Ordnance Survey).
Pensado para su uso en entornos urbanos y con vehículos reales, como hemos dicho, circulando a baja velocidad, puede ser útil, por ejemplo, para vehículos de reparto automatizados, o de servicio.
Al circular a baja velocidad, y según cuentan los mismos responsables del proyecto, se reducen también los peligros y, por lo tanto, se da salida comercial viable a un vehículo autónomo en un plazo de tiempo menor.
El código fuente del software se puede descargar e instalar en cuestión de minutos (según podemos ver en el vídeo publicado por la misma iniciativa, en un sistema GNU/Linux y, concretamente, en la distribución Ubuntu), disponiendo de una interfaz simple, intuitiva y configurable, y de un entorno de simulador integrado para poder realizar pruebas.
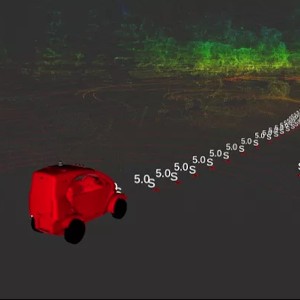
Dicho simulador reproduce un entorno de conducción virtual (a partir del simulador de robótica Gazebo), y un vehículo virtual, en el cual podemos probar el código desarrollado, o lo podemos integrar directamente en un vehículo para probarlo sobre el terreno.
En el paquete del software también se incluyen tutoriales, de forma que incluso programadores aficionados pueden desarrollar soluciones para vehículos autónomos a partir de este trabajo.
Los usuarios de este software pueden encontrarse, compartir conocimientos, satisfacer dudas o intercambiar opiniones en un foro de la plataforma ROS (Robotic Operating System).