Actualizado el 09/12/2025
Actualizado el 09/12/2025
Simulador de moto GP eléctrico y sostenible con open innovationEscrito por Redacción TNI el 18/04/2017 a las 14:57:044395
 Schneider Electric ha desarrollado junto a XBS un innovador simulador de Moto GP eléctrico que permite sentir la emoción de conducir verdaderamente una moto de gran cilindrada en un circuito de carreras. El proyecto ha contado con un ecosistema innovador, con la colaboración conjunta del Instituto Schneider Electric de Formación (ISEF), XBS y la ayuda de estudiantes de La Salle y la Universidad Politécnica de Cataluña.
XBS es una start-up formada por dos emprendedores catalanes, que desde su garaje empezaron a trabajar en la creación de simuladores de Moto GP para el entrenamiento de pilotos profesionales y semi-profesionales. Su producto se dirige también a aquellos que siempre han soñado con vivir la experiencia de conducir una verdadera Moto GP en un circuito de carreras.
El resultado es un simulador de Moto GP únicamente eléctrico, con una respuesta más rápida, un consumo más eficiente y que se conecta a la red monofásica. Se trata de una solución donde se utiliza tecnología servo accionamientos eléctricos y el sistema de control de Schneider Electric.
Según José Miguel Solans Nerín, Business Development & Training Director de Schneider Electric, “Hace tiempo que desde el Instituto Schneider Electric de Formación, el ISEF, teníamos ganas de embarcarnos en un reto como el que nos propuso XBS, poner la tecnología de la automatización de Schneider Electric al servicio de las emociones para que las personas experimenten lo que es pilotar una moto G P de una forma sostenible y segura”
Descripción del simulador
El Nuevo Simulador de Moto GP, consta de tres elementos principales. La parte mecánica cuenta con el carenado de una moto de 1000cc real, el cual se ha colocado en un sistema mecánico de 5 ejes, que permite que el equipo simule cualquier movimiento que puede hacer una moto de verdad: aceleración/frenada, caballito/caballito invertido, derrape trasero/delantero y el movimiento de plegada, llegando al 60%. Estos movimientos se consiguen gracias a la interconexión mecánica de diferentes servomotores y ejes eléctricos, diseñados para que el simulador soporte a usuarios de hasta 100 Kg.
La interacción de usuario con la dirección del manillar, puño de aceleración y frenada, así como la inclinación de la moto y del resto de botones de la misma, es enviada al PC y, por consiguiente, al juego de moto GP, a través de una tarjeta electrónica. Y, gracias a un programa informático, el PC desglosa los valores de movimiento del juego Moto GP de cada uno de los ejes eléctricos del simulador y se envían vía Ethernet/OPC, en un tiempo de ciclo muy ajustado (<10ms) para que sea imperceptible para el usuario, al PLC que gobierna el control de cada uno de los ejes.
Esta tecnología permite al usuario vivir una experiencia realista y sentir la emoción de estar conduciendo verdaderamente una moto de gran cilindrada en un circuito de carreras.
La solución de Schneider Electric
Entre los retos del proyecto, estaba pasar de los tres ejes habituales a los cinco, que permitieran vivir la experiencia real de conducir una auténtica Moto GP en un proceso de simulación.
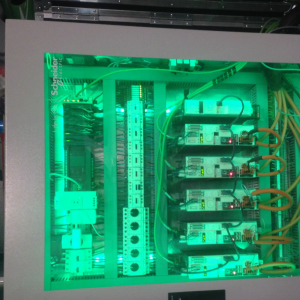
Para la realización de la parte mecánica se ha optado por la instalación de Servomotores y Servodrivers (con alimentación monofásica) de la gama Lexium 32 de Schneider Electric. Con cinco Lexium 32 se puede controlar el movimiento de cinco ejes lineales PAS4x o MAXR de Schneider Electric.
El cuadro de control dispone de todas las protecciones eléctricas de Schneider Electric necesarias para cada uno de los ejes. Las órdenes de movimiento de cada uno de los ejes las proporciona un controlador lógico (PLC), el modelo Modicon M241 de Schneider Electric, a través de un bus CanOpen. El PLC recoge la posición de cada uno de los ejes y las envía a través Ethernet y por OPC-DA al PC y recibe las órdenes de movimiento desde el ordenador.
La interfaz de control para los diferentes modos de juego se puede realizar a través de una pantalla HMI instalada en el cuadro de control y también a través de un webserver, conectándolo vía wifi al PLC. Con los datos recibidos desde el PLC y los datos del manillar de la moto, el PC interactúa con el juego a través de una aplicación informática. Esto permite diferentes modos de funcionamiento, o la posibilidad de cargar telemetrías reales para el perfeccionamiento del piloto en un circuito en particular.
Por último, se ha introducido la tecnología VR para una mayor inmersión del jugador en el entorno de simulación. Todo ello hace que la experiencia sea más realista y se transmite la emoción de conducir una verdadera moto de gran cilindrada en un circuito de carreras.
|

